- + Merck Millipore
- + Thermo Fisher
- + IKA
- + 显微镜
- + 光度计
- + 成像系统
- + MACS Miltenyi
- + 均质机
- + 粒子计数器
- + 冻干机
- + 灭菌系统
- + 细胞
- + 微量移液工作站
- + 振荡培养箱
- + 生物反应器
- + 切片机
- + 培养箱
- + 蠕动泵
- + 细胞破(粉)碎机
- + 转印膜
- + 超滤管
- + Pellicon 超滤系统
- + 超低温冰箱
- + 清洗机
- + 干燥机
- + 洗瓶机
- + 离心泵
- + 容积泵
- + 各种阀
- + 酶标仪
- + 洗衣板
- + 旋光仪
- + 折光仪
- + 行星球磨机
- + 振动筛
- + 基因导入仪
- + 手套系列
- + 接头\\连接器
- + 培养板/培养瓶
- + 温度控制系统
- + 制冷器
- + 存取系统
- + 轧盖机
- + 细胞因子
- + 细胞分选仪
- + 生物安全柜
- + 渗透压仪
- + 拉曼光谱仪
- + 电泳系统
- + 纯水系统
- + 萃取仪
- + 谱新生物
- + TA 仪器
- + wako
PID控制算法基本原理
更新时间:2021-11-24 浏览次数:2796
我们的学生时代里总是会出现一些自己非常不理解的题目,zui 常见的就是初中数学中喜欢一边加水一边放水还速率不一的水池管理员。但长大后在工作中发现在生物行业生产上这是属于再正常不过的工艺了。
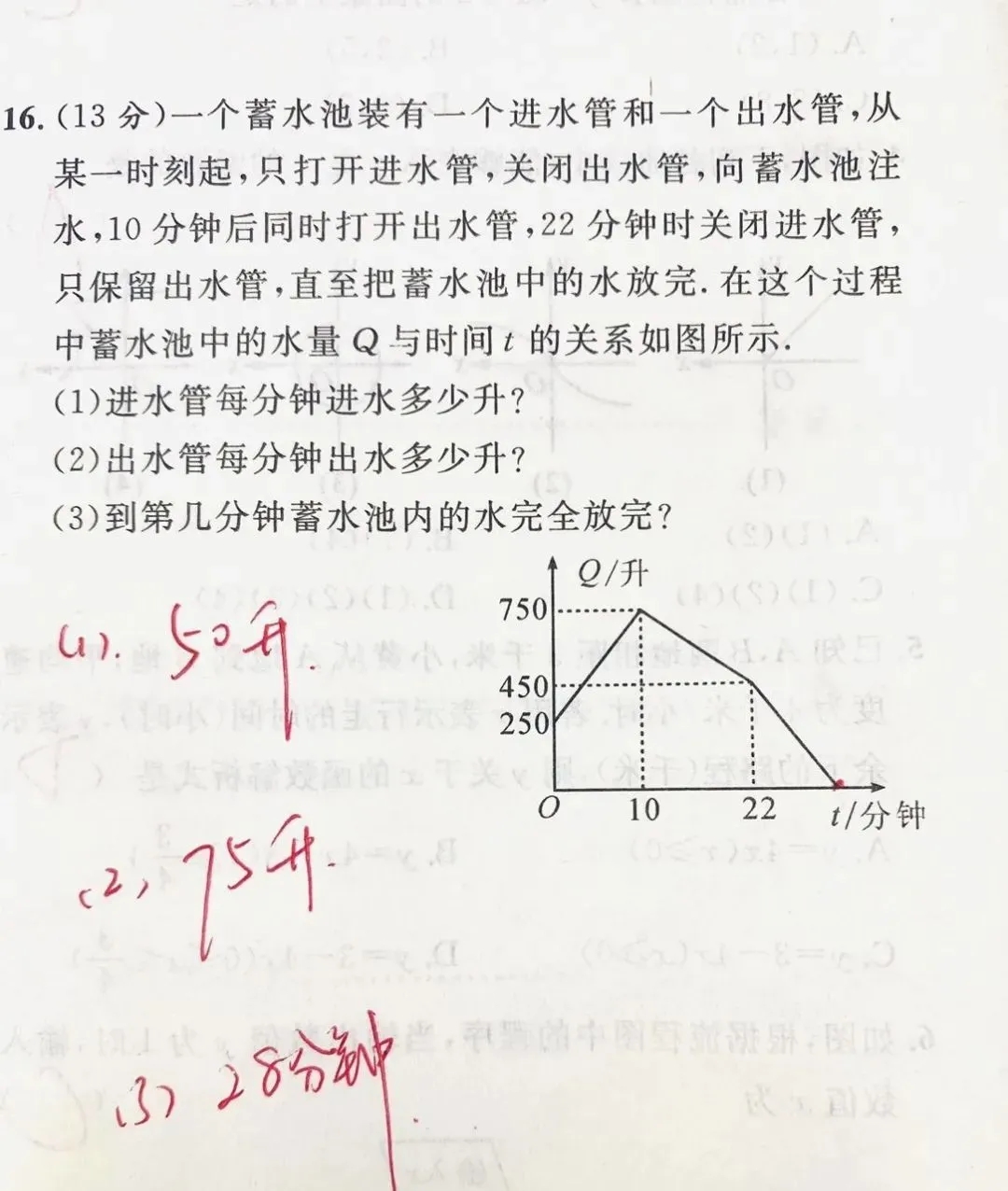
图:来源于【路老师的数学日记】
这种数学模型常见于生物反应器上。细胞是生物行业内zui常见的个体,想大规模把细胞以理想状态培育,营养物质浓度、温度或氧气含量等参数都需要精准调节。
这个时候我们就需搭建数学模型来配置DO电极实时监控并反馈至控制系统,通过PID来调节进气量等参数来保证DO数值的稳定。那PID控制具体指的是什么,我们又该如何去调节呢?
让我们先看一下PID控制算法的基本原理:比例(proportional)、积分(integral)、微分(derivative)。这是一种常见的“保持稳定"控制算法.
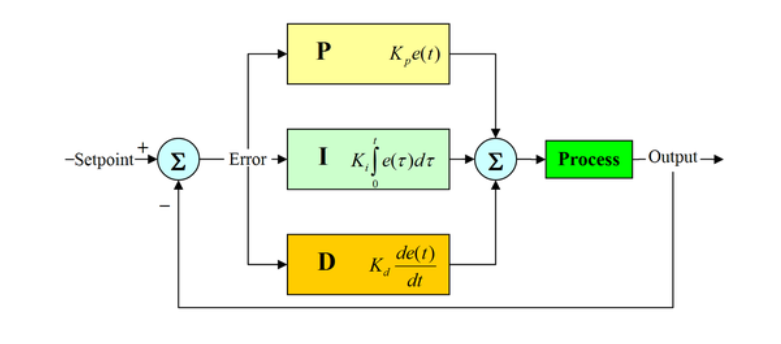
其中:
Kp:比例增益,是调适参数;
Ki:积分增益,也是调适参数;
Kd:微分增益,也是调适参数;
e:误差=设定值(SV)- 当前值(PV);
t:目前时间。
Kp比例控制考虑当前误差,误差值和一个正值的常数Kp(表示比例)相乘。一般来说需要控制的量,比如水温,有它现在的当前值,也有我们期望的设定值。比例控制器实际上就是个放大倍数可调的放大器,即△P=Kp×e,式中Kp为比例增益,即Kp可大于1,也可小于1。e为控制器的输入,也就是当前值与设定值之差,又称为偏差。
比如在给水加热的时候,当当前值和设定值两者差距不大时,就让加热器“轻轻"加热一下。要是因为某些原因,温度降低了很多,偏差变大,就让加热器“稍稍用力"加热一下。要是当前温度比目标温度低得多,偏差变得更大,就让加热器“开足马力"加热,尽快让水温到达目标附近。
Kp越大,调节作用越激进,系统响应会加快,Kp调小会让调节作用更保守。
控制器的积分作用就是为了消除自控系统的余差而设置的。比如在给水加热时,当水的温度接近设定的温度时,偏差变小,加热器的输出会变小,如果在某个阶段,温度还未达到设定值,然而加热量和系统的散热量相等的时候,温度不会发生变化,偏差就不会变化,加热器的输出也不会变化,这样温度就不会达到设定温度,为了消除这种情况,引入积分控制。
所谓积分,就是随时间进行累积的意思,即当有偏差输入e存在时,积分控制器就要将偏差随时间不断累积起来,也就是积分累积的快慢与偏差e的大小和积分速度成正比。只要有偏差e存在,积分控制器的输出就要改变,也就是说积分总是起作用的,只有偏差不存在时,积分才会停止。
对于恒定的偏差,调整积分作用的实质就是改变控制器输出的变化速率,这个速率是通过积分作用的输出等于比例作用的输出所需的一段时间来衡量的。积分时间小,表示积分速度大,积分作用就强;反之,积分时间大,则积分作用就弱。如果积分时间无穷大,表示没有积分作用,控制器就成为纯比例控制器。
实际上积分作用很少单独使用,通常与比例作用一起使用,使其既具有把偏差放大(或缩小)的比例作用,又具有将偏差随时间累积的积分作用,且其作用方向是一致的。
这时控制器的输出为:△P=Ke+△Pi,式中△P为控制器输出值的变化。Ke为比例作用引起的输出,△Pi为积分作用引起的输出。
微分控制主要是用来克服被控对象的滞后,是通过误差的变化率预报误差信号的未来变化趋势。通过提供超前控制作用,微分控制能使被控过程趋于稳定。因此,它经常用来抵消积分控制产生的不稳定趋势。
不论比例调节作用,还是积分调节作用都是建立在产生误差后才进行调节以消除误差,都是事后调节,因此这种调节对稳态来说是无差的,对动态来说肯定是有差的,因为对于负载变化或给定值变化所产生的扰动,必须等待产生误差以后,然后再来慢慢调节予以消除。
但一般的控制系统,不仅对稳定控制有要求,而且对动态指标也有要求。通常都要求负载变化或给定调整等引起扰动后,恢复到稳态的速度要快。因此光有比例和积分调节作用还不能*要求,必须引入微分作用。
比例作用和积分作用是发生误差后才进行调节,而微分作用则是事前预防控制,即一发现反馈值有变大或变小的趋势,马上就输出一个阻止其变化的控制信号,以防止出现过冲或超调等。
D越大,微分作用越强,D越小,微分作用越弱。系统调试时通常把D从小往大调,具体参数由试验决定。
PID控制器的参数整定是控制系统设计的核心内容。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。
PID控制器参数整定的方法很多,概括起来有两大类:
它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
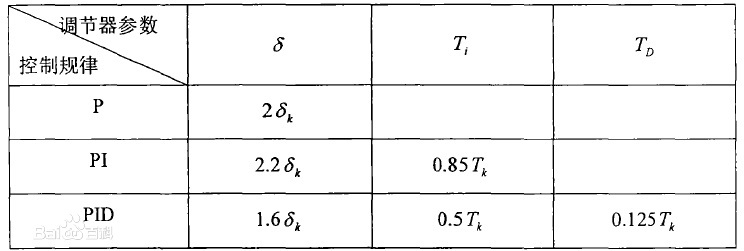
它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后调整与完善。现在一般采用的是临界比例法。
利用此方法进行 PID控制器参数的整定步骤如下:
(1)首先预选择一个足够短的采样周期让系统工作;
(2)仅加入比例控制环节,将比例度逐渐减小,直到系统对输入的阶跃响应出现临界振荡(等幅振荡),记下这时的临界比例度和临界振荡周期;
(3)在一定的控制度下通过公式计算得到PID控制器的参数。
① 在输出不振荡时,增大比例增益P;
② 在输出不振荡时,减小积分时间常数Ti;
③ 在输出不振荡时,增大微分时间常数Td。
① 确定比例增益P
确定比例增益P时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。比例增益P调试完成。
② 确定积分时间常数Ti
比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡。之后在反过来,逐渐加大Ti,直至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。积分时间常数Ti调试完成。
③ 确定微分时间常数Td
微分时间常数Td一般不用设定,为0即可。若要设定,与确定 P和Ti的方法相同,取不振荡时的30%。
④ 系统空载、带载联调,再对PID参数进行微调,直至满足要求。
广州东锐科技有限公司是一家集设备研发、生产、销售、代理、服务为一体的全产业链服务商。如您需咨询生物反应器和发酵罐等技术问题可联系东锐科技技术人员为您排忧解难。
- (上一篇):正确安装粒子计数器,对您的使用很重要!
- (下一篇):生命之水的守护者——Advanced渗透压仪